無線網路 part1
CH1-2
1. 無線區域網路的兩種基本架構
Infrastructure Mode
- 架構特點:透過存取點 (Access Point, AP) 作為中繼站
- 主要優點:
- 管理集中化,易於控制和監管
- 涵蓋範圍較大
- 可連接有線網路,實現網路互連
- 支援較多用戶同時連線
- 具備較佳的安全性管理
Ad-hoc Mode
- 架構特點:P2P 不用AP
- 主要優點:
- 成本低,設定簡單
- 具備自我組織能力
- 適合移動性高的應用場景
2. 行動台服務的五項功能
| 功能 | 英文名稱 | 說明 |
|---|---|---|
| 1. 驗證 | Authentication | 驗證身分的合法性 |
| 2. 取消驗證 | Deauthentication | 中斷已建立的驗證關係 |
| 3. 關聯 | Association | 建立行動台(MS)與AP之間的連接 |
| 4. 重新關聯 | Reassociation | 在不同AP間切換連接 |
| 5. 解除關聯 | Disassociation | 中斷與AP的關聯關係 |
3. 分散式系統服務的三項功能
3.1 Distribution
BSS <--> WLAN LAN3.2 IntegrationWLAN <--> other network3.3 MS Reassociation Support- sync data during the switch between aps
4. IEEE 802.11 MAC 的兩種協調功能
4.1 分散式協調功能 (DCF, Distributed Coordination Function)
-
機制內容:採用 CSMA/CA機制 [[CH7 無線網路#^aaba23]]
-
避免同時得訊框碰撞
-
流程
-
特點:分散式控制,所有節點平等競爭存取權
-
場景:一般資料傳輸
4.2 點協調功能 (PCF, Point Coordination Function)
- 概要:由AP集中控制存取
- 運作特點:輪詢分配傳輸機會,支援 QoS
- 適用場景:即時性要求較高的應用
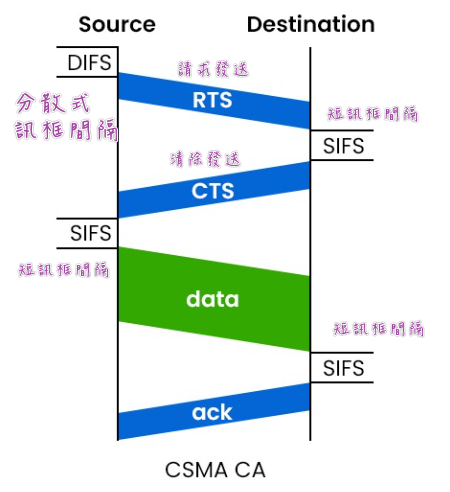
5. RTS/CTS 機制詳述
5.1 運作原理
RTS (Request to Send)
- 傳送端先送出 RTS 控制框,預約傳輸媒體
- 包含傳輸時間資訊
CTS (Clear to Send)
- 接收端回應 CTS 控制框,確認可以接收
- 通知其他節點暫時不要傳輸
5.2 解決的問題
- 隱藏節點問題:避免無法偵測到彼此的節點同時傳輸
- 暴露節點問題:減少不必要的等待時間
5.3 NAV (Network Allocation Vector)
- 其他節點根據 RTS/CTS 中的時間資訊設定 NAV
- 在 NAV 期間內不進行傳輸,避免碰撞
5.4 傳輸流程圖
發送端 A 接收端 B 其他節點 C | | | |-- RTS --> | | | |-- CTS --> | (設定 NAV) |-- DATA -->| | (等待中) |<-- ACK ---| | | | | (NAV 結束)6. Backoff 機制詳述
6.1 機制目的
減少碰撞機率,提高網路效率
6.2 運作流程
- 偵測媒體:節點欲傳輸時先偵測媒體是否閒置
- 等待 DIFS:媒體閒置時等待 DIFS (DCF Inter-frame Space) 時間
- 競爭視窗:從競爭視窗 (Contention Window, CW) 中隨機選擇 backoff 時間
- 倒數計時:媒體閒置時進行倒數,忙碌時暫停
- 傳輸或重試:倒數到零時傳輸;若碰撞則增大 CW 並重新 backoff
6.3 二進位指數退避演算法
演算法規則
- 初始值:
CW = CWmin - 碰撞後:
CW = min(2×CW+1, CWmax) - 成功後:
CW重設為CWmin - 公平性:確保所有節點都有平等的傳輸機會
時間軸示例
時間 → 0 DIFS Backoff 傳輸 |-----|--------|----------| 閒置 等待 隨機延遲 資料傳送6.4 機制效益
- 分散節點的傳輸時間
- 降低同時傳輸造成的碰撞機率
- 提升整體網路的傳輸效率
CH3
1. DCA 演算法
特點
- 節點需要傳輸時,動態選擇可用的頻道
- 透過監聽機制偵測頻道是否被占用
- 鄰近節點若偵測到頻道被占用,會延遲處理或選擇其他頻道
- 避免同時使用相同頻道造成碰撞
RTS/CTS
- 解決隱藏節點問題
RTS req -> CTS allow -> Data transform -> Ack confirm
關鍵機制:
- CTS會廣播 → 隱藏節點也聽得到
- NAV機制 → 虛擬載波感測
- 頻道預約 → 避免碰撞
如何建立表格
DCA通常維護一個頻道狀態表(Channel State Table):
| 頻道編號 | 狀態 | 使用節點 | 信號強度 | 可用時間 |
|---|---|---|---|---|
| CH1 | 忙碌 | Node A | -45dBm | - |
| CH2 | 空閒 | - | - | 可立即使用 |
| CH3 | 忙碌 | Node C | -60dBm | - |
重點: 鄰近節點透過載波感測(Carrier Sensing)持續更新此表格
2. DSDV 路由協定
就像是dijkstra演算法的距離向量法
特性
- 主動式(Proactive)路由協定
- 基於距離向量演算法(類似RIP)
- 每個節點維護完整的路由表+序列編號
- 用編號和路徑成本決定路由表
舉例說明
網路拓撲:
A ←→ B ←→ C ←→ D節點B的路由表:
| 目的地 | 下一跳 | 距離(跳數) | 序號 |
|---|---|---|---|
| A | A | 1 | 46 |
| C | C | 1 | 52 |
| D | C | 2 | 38 |
序號機制(Sequence Number):
- 每個目的地都有序號,用於避免路由迴圈
- 序號越大代表路由資訊越新
- 當B收到更大序號的路由更新時,才會更新路由表
重點: DSDV透過定期廣播路由更新和序號機制,確保路由表的一致性和即時性
3. DSR 回應式路由
特點
- 回應式(Reactive)路由協定
- 來源路由(Source Routing):完整路徑記錄在封包標頭
- 路由探索: 沒有可用的時候會發送的RREQ 透過廣播進行感知
- 不需維護路由表
運作流程
階段1: 路由發現(Route Discovery)
A想傳送給D:A → broadcast RREQB收到 → 加入自己ID → 轉發RREQ [A,B]C收到 → 加入自己ID → 轉發RREQ [A,B,C]D收到 → 回傳RREP [A,B,C,D]階段2: 路由維護(Route Maintenance)
- 使用路由快取(Route Cache)儲存已知路徑
- 連結中斷時觸發路由錯誤(RERR)訊息
- 來源節點重新啟動路由發現
封包格式:
[來源|目的|路徑資訊:A→B→C→D|資料]重點: DSR將完整路徑資訊放在封包中,中間節點只需依序轉發,不用查詢路由表
4. AODV 回應式路由協定
特點
- 回應式路由
- 結合DSR的按需特性 + DSDV的路由表與序號機制
- 只有在需要時才建立路由
- 使用跳數(hop count)作為路由度量
運作原理
1. 路由請求(RREQ)階段:
節點A要傳送給節點E:
A廣播RREQ → B,C收到B,C建立反向路由(指向A) → 繼續廣播RREQ最終E收到RREQ2. 路由回覆(RREP)階段: 建立反向路徑
E單播RREP沿反向路由回A中間節點建立正向路由(指向E)A收到後產生RREP(送回去) → 路由建立完成
sequenceDiagram
participant A
participant B
participant C
participant D
participant E
%% 路由請求 (RREQ)
A->>B: t1 RREQ (廣播)
B->>C: t2 RREQ (轉發,建立反向路由)
C->>D: t3 RREQ (轉發,建立反向路由)
D->>E: t4 RREQ (轉發,建立反向路由)
E->>E: t5 收到 RREQ
%% 路由回覆 (RREP)
E-->>D: t6 RREP
D-->>C: t7 RREP (轉發,建立正向路由)
C-->>B: t8 RREP (轉發,建立正向路由)
B-->>A: t9 RREP (轉發,建立正向路由)
A->>A: t10 收到 RREP (路由建立完成)
%% 資料傳輸
A->>B: t11 DATA
B->>C: t11 DATA
C->>D: t11 DATA
D->>E: t11 DATA (成功送達)
%% 鏈路斷裂
C--xD: t12 鏈路斷裂 (╳╳╳)
%% 路由錯誤 (RERR)
D-->>C: t13 RERR
C-->>B: t13 RERR
B-->>A: t13 RERR
A->>A: t14 刪除路由 (路由失效)